
منذ أن عرف الإنسان البحر، لم يكفّ عن محاولة فك ألغاز أعماقه، من قوارب الفراعنة والفينيقيين، إلى رحلات كولومبوس وماجلان، وصولا إلى حملة السفينة "تشالنجر" في القرن التاسع عشر التي وضعت أسس علم المحيطات، ثم الغوص الأسطوري إلى أعمق نقطة على الأرض بخندق ماريانا عام 1960. ورغم كل هذه المحاولات، لا تزال أعماق البحار تمثل "الفضاء الداخلي" للكوكب، حيث الظلام الدامس والضغط المهول والبرودة القارسة.
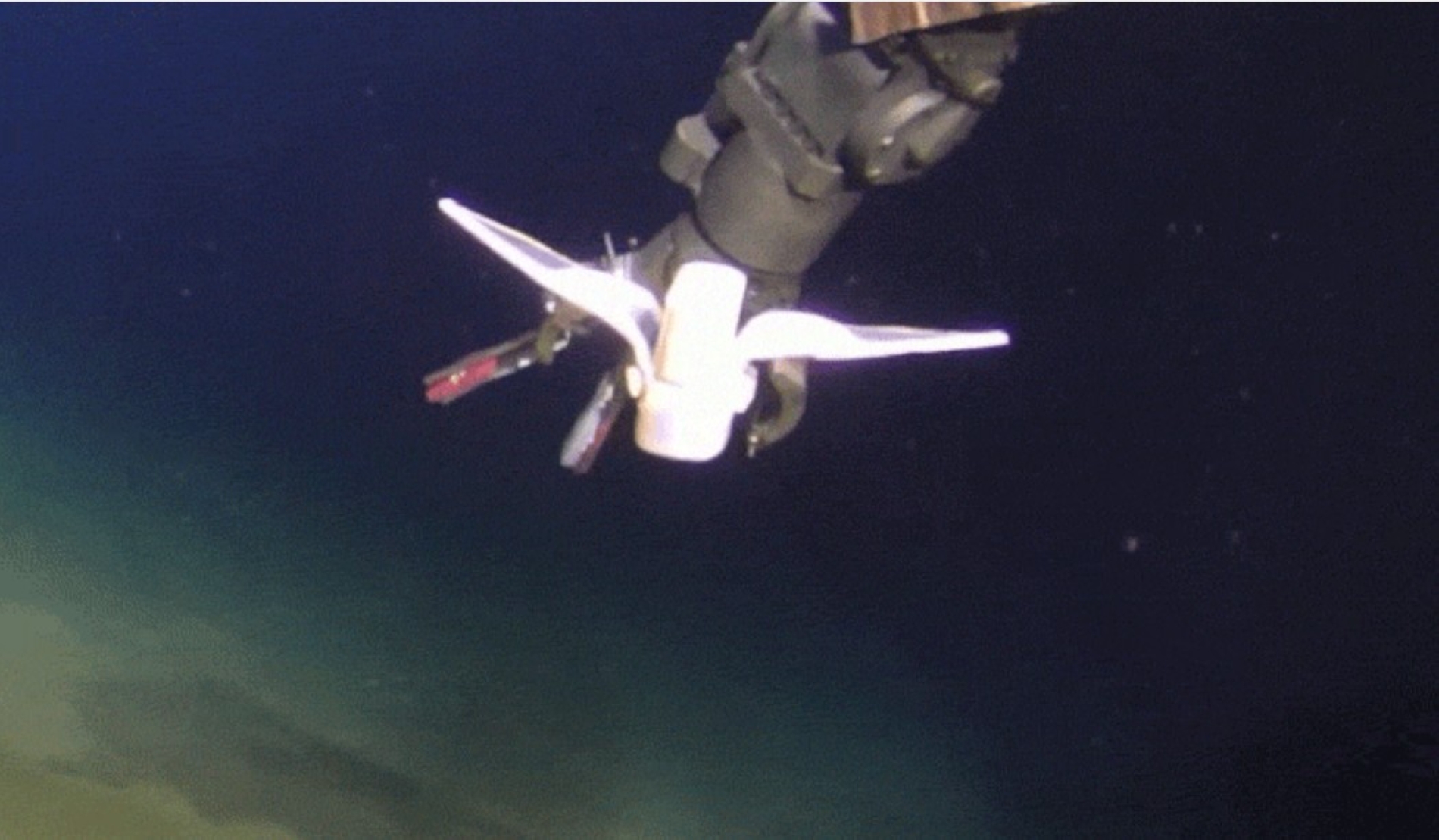
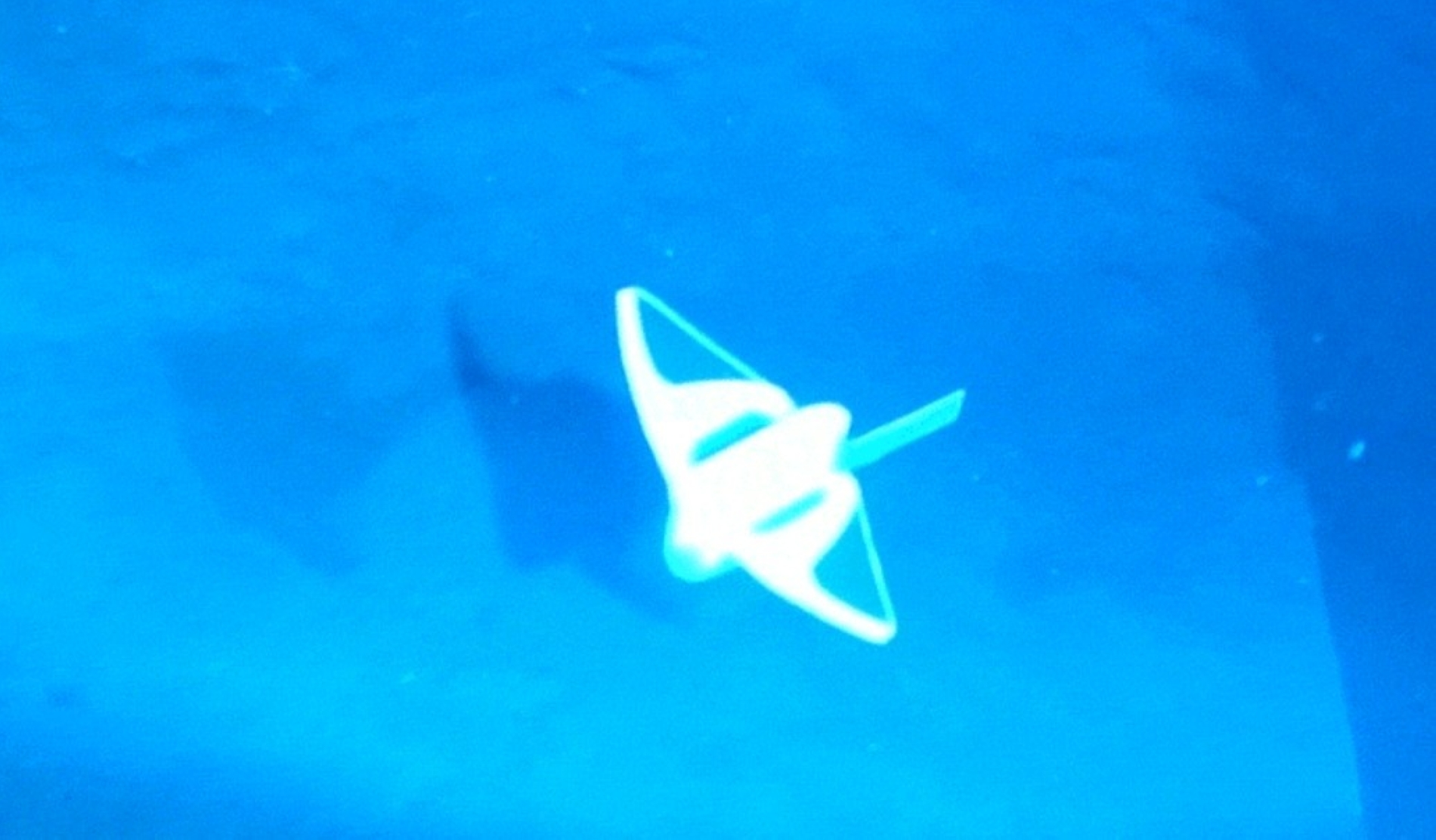
اليوم، يضاف فصل جديد إلى هذا التاريخ الطويل، مع ابتكار سمكة روبوتية مرنة قادرة على السباحة في أعماق تتجاوز أربعة آلاف متر، فاتحة الباب أمام عصر جديد من الاستكشاف لا يعتمد على الغواصات الثقيلة بل على روبوتات لينة تحاكي الكائنات البحرية نفسها.
يعد المحيط العميق من أقل مناطق الأرض استكشافا، حيث يفرض تحديات هائلة بسبب الضغوط الهائلة، ودرجات الحرارة التي تقترب من التجمد، والظلام الدامس. وكانت الروبوتات التقليدية المتنقلة في أعماق البحار، وتتكون عادة من مكونات صلبة، هي الأدوات الأساسية لاستكشاف أعماق المحيطات.
ومع ذلك، تواجه هذه الآلات "الصلبة" تحديات شائعة في البيئات المتطرفة تحت الماء، بما في ذلك زيادة الوزن، ومحدودية القدرة على التكيف، وإحداث اضطراب للمخلوقات البحرية في الأعماق. وتسلط هذه القيود الضوء على الحاجة إلى بدائل مبتكرة.
حل واعد
تبرز الروبوتات اللينة كحل واعد لإحداث ثورة في استكشاف أعماق البحار، حيث توفر مرونة طبيعية في مواجهة الضغط، وهياكل لينة بالكامل، وغطسا هادئا يقلل الاضطراب البيئي. وبفضل قدرتها على التكيف وتصميمها غير المتطفل، تمتلك الروبوتات اللينة المتنقلة القدرة على تمكين أبحاث محيطية أكثر استدامة وعمقا.
عندما يفكر معظم الناس في الروبوت، يتخيلون المعدن الصلب والحركات الصارمة. لكن هناك نوع آخر من الروبوتات يتحدى هذا التصور الشائع. إنه الروبوت المرن والقابل للانحناء، الذي يتحرك بشكل أقرب إلى الحياة العضوية منه إلى الآلة. يطلق على هذه الروبوتات اسم الروبوتات اللينة. فبدلا من الفولاذ والغرافيت، تصنع الروبوتات اللينة من مواد مثل السيليكون والمطاط والجل، مما يمنحها نطاقا وأسلوبا من الحركة يكاد يكون مستحيلا بالنسبة للآلة التقليدية. ولأنها تتحرك وتتصرف بشكل فريد، تتمتع الروبوتات اللينة بالعديد من المزايا، مقارنة بنظيراتها ذات الهيكل الفولاذي، بما في ذلك مقاومة أفضل للتصادم وقدرة محسنة على الحركة المعقدة.
فكرة صنع روبوتات بمواد أكثر مرونة، وجدت منذ فترة طويلة. فقد بدأت التطبيقات العملية مع العضلة الصناعية، التي تم تطويرها في عام 1950. تتكون هذه الأجهزة، المعروفة أيضا باسم "عضلات ماكبين الهوائية"، من أنبوب هوائي مرن محمي بشبكة مضفرة. وعلى الرغم من أنها طورت في الأصل لتقويم العظام، فقد تم استخدام العضلة الهوائية في العديد من تصميمات الروبوتات منذ ذلك الحين. وقد ألهمت "عضلة ماكبين" أيضا العديد من التقنيات التي أرست الأساس لمجال الروبوتات اللينة الحديث.